44 KiB
Höhere Mathematik
Inhalt
- Höhere Mathematik
Einführung
Einsatzgebiet
- Annähern komplexer Formeln in endlicher Zeit
- Berechnung von Algorithmen durch Computer
- Algorithmen ohne expliziter Lösungsdarstellung
- Alternative Lösungsvorgänge für höhere Performance
Arten von Lösungen
- Direkte Verfahren - Exakte Lösung nach endlicher Zeit
- Näherungsverfahren/Iteratives Verfahren - Approximation nach begrenzter Anzahl Rechenschritte
Verbindung zur Informatik
- Effiziente Berechnung numerischer Algorithmen
- Speicherung und Darstellung von Zahlen
- Computergrafik & Bildverarbeitung
- Neuronale Netze
Typische Fragestellungen
- Wie wirkt sich die Beschränkung der Anzahl Bits für Zahlenformate auf Rechenergebnisse und Rechengenauigkeit aus?
- Numerische Lösung von Nullstellenproblemen
- Numerische Integration
Rechnerarithmetik
Maschinenzahl
Maschinenzahlen werden als Zahlen x in folgender Form dargestellt:
x = m \cdot B^e
x: Die zu repräsentierende Zahlm: Die Mantisse (der darstellbare Zahlenwert)B: Die Basis der zu repräsentierenden Zahle: Der Exponent (der Stellenwert der Mantissem)
Beispiel:
1337 = 0.1337 * 10^4
Maschinenzahlen sind normalisiert, wenn
- für die Mantisse
m0.1 <= |m| < 1.0zutrifft
Maschinenzahlen werden normalisiert, damit es zu jedem Wert eine eindeutige Darstellung als Maschinenzahl gibt.
Grenzen von Maschinenzahlen
x_{max} = B^{e_{max}} - B^{e_{max}-n} = (1 - B^{-n}) \cdot B^{e_{max}}
x_min = B^{e_{min} - 1}
Datentypen gem. IEEE
float oder single: 32 Bit - 1 Bit für Vorzeichen, 23 Bit für Mantisse m, 8 Bit für Exponent e
double: 64 Bit - 1 Bit für Vorzeichen, 52 für Mantisse m, 11 Bit für Exponent e
Rundungsfehler und Maschinengenauigkeit
Absoluter Fehler:
|\tilde{x} - x|Relativer Fehler:
\frac{|\tilde{x} - x|}{|x|}Maximaler absoluter Rundungsfehler:
\frac{B}{2} \cdot B^{e - n - 1}Maschinengenauigkeit oder maximaler relativer Rundungsfehler:
\frac{1}{2} \cdot B^{1 - n}Fehlerfortpflanzung bei Funktionsauswertung:
Relativ:
\frac{|f'(x)| \cdot |x|}{|f(x)|} \cdot \frac{|\tilde{x} - x|}{|x|}Absolut:
|f'(x)| \cdot |\tilde{x} - x|B: Die Basis der Maschinenzahle: Der Exponent der Maschinenzahl (Standard-Wert:0)n: Die Anzahl Stellen der Mantissemx: Der darzustellende Wert\tilde{x}: Die Annäherung/Approximation anxf: Auszuwertende Funktion
Konditionszahl
Die Konditionszahl gibt an, wie gross der potenzielle relative Fehler einer numerischen Lösung ist.
Eine niedrige Konditionszahl (K \le 1) bedeutet einen niedrigen Fehler, eine hohe Konditionszahl ein grosses Fehlerrisiko.
Formel:
Konditionszahl:
K = \frac{|f'(x)| \cdot |x|}{|f(x)|}Nullstellenprobleme
Problemstellung und Ansatz
Es wird der korrekte Wert x für eine Aufgabe gesucht.
- Aufgabe ausformulieren:
x = \sqrt{A} - Aufgabe zu Nullstellenproblem umformulieren (Funktion, die bei gesuchtem
ximmer0ergibt):f(x) = x^2 - A - (Algorithmisch) richtiges
xfinden, bei dem die Funktion0ergibt - Das gefundene
xist die Lösung
Note:
Als Ausgangsbedingung für eine numerische Lösung eines Nullstellenproblems können diverse Bedingungen verwendet werden wie etwa:
- Eine bestimmte Anzahl Iterationen
- Abstand zwischen
x_nundx_{n + 1}unterschreitet Threshold (approximiertes Resultat)
- Ein niedriger Threshold ergibt ein genaueres Resultat
- Ein Threshold von
0ergibt das genaue Resultat
Fixpunktiteration
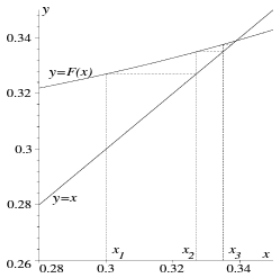
Ein möglicher Ansatz für ein solches Problem ist eine Fixpunktiteration.
Der Vorgang für eine solche ist folgende:
- Die Funktion in die Form
F(x) = x.
Beispiel fürf(x) = x^2 - A:
F(x) = \sqrt{A} - Beliebigen Wert für
x_0wählen (vorzugsweise Wert in Nähe von erwarteter Lösung) - Fixpunktiteration
x_{n + 1}berechnen:
x_{n+1} = F(x_n)
Dies wird durchgeführt bis die Ausgangsbedingung erfüllt ist.
Code-Beispiel:
import math
threshold = 10 ** -6
def f(x): # Funktion f in Nullstellenform
return math.cos(x) - x
def F(x): # Funktion f in Fixpunktform
return math.cos(x)
def F_(x): # Die Ableitung F'(x)
return return -math.sin(x)
x = 0.75 # Startwert - angenommene, etwaige Lösung
if F_(x) >= 1:
print("Fehler: Fixpunktiteration divergiert!")
else:
while math.abs(x - F(x)) >= threshold:
x = F(x)
print(f"Approximierte Lösung: {x}")
Konvergenz
Eine Fixpunktiteration is konvergent (also berechenbar), wenn folgendes zutrifft:
|F'(\tilde{x})| < 1Divergenz
Eine Fixpunktiteration is divergent (also unberechenbar), wenn folgendes zutrifft:
|F'(\tilde{x})| \ge 1F(x): Die FixpunktgleichungF'(x): Die Ableitung der Fixpunktgleichungx: Das genaue Resultat fürx\tilde{x}: Das approximierte Resultat fürx(Fixpunkt)x_n: Die $n$-te Approximation fürx
Banachscher Fixpunktsatz
Der Fixpunktsatz dient dazu, abzuschätzen, wie gross der Fehler des Ergebnisses einer Fixpunktiteration in etwa ist.
Fixpunktsatz:
|F(x) - F(y)| \le \alpha \cdot |x - y| \text{für alle }x,y \in [a, b]Alternative Umformung:
\frac{|F(x) - F(y)|}{|x - y|} \le \alphaFehlerabschätzung:
a-priori Abschätzung:
|x_n - \overline{x}| \le \frac{\alpha^n}{1 - \alpha} \cdot |x_1 - x_0|a-posteriori Abschätzung:
|x_n - \overline{x}| \le \frac{\alpha}{1 - \alpha} \cdot |x_n - x_{n - 1}|Konstante \alpha:
\alpha = \max_{x_0 \in [a, b]}| F'(x_0)|\alpha \approx |F'(\tilde{x})|Folgendermassen kann dieser aufgestellt werden:
Note:
In dieser Passage wird sowohla(der Buchstabe "a") als auch\alpha(Alpha) verwendet. Diese haben hier eine unterschiedliche Bedeutung.
- Start- und Endpunkt
aundbauswählen, welche genau einen Fixpunkt\tilde{x}beinhalten - Prüfen, ob folgendes Zutrifft: Alle Ergebnisse von
F([a, b])befinden sich im Intervall[a, b] - Konstante
\alphaberechnen (gem. Formel) - Die a-priori und die a-posteriori Abschätzung kann nun beliebig angewendet werden. Hierbei wird für
x_0der Wertaverwendet.
Newton-Verfahren

Das Newton-Verfahren erreicht die Konvergenz (d.h. das (approximierte) Resultat) um einiges schneller.
Hierfür wird die Funktion f in der Nullstellenform benötigt (f(x) = \text{[...]} = 0).
Newton-Verfahren:
x_{n + 1} = x_n - \frac{f(x_n)}{f'(x_n)}Vereinfachtes Newton-Verfahren:
x_{n + 1} = x_n - \frac{f(x_n)}{f'(x_0)}Konvergenz-Kontrolle:
\left|\frac{f(x) \cdot f''(x)}{(f'(x))^2}\right| < 1Das Ergebnis ist wahr, wenn mit dem gewählten x eine Konvergenz erreicht werden kann.
- Startpunkt
x_0in der Nähe einer Nullstelle wählen - (Wahlweise vereinfachtes) Newton-Verfahren anwenden bis
x_nundx_{n + 1}bis Ausgangsbedingung erreicht wird
Sekantenverfahren
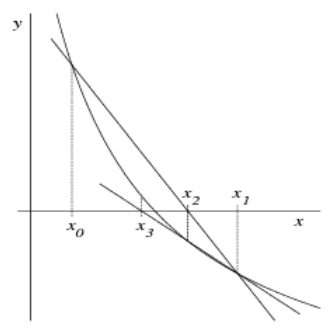
x_{n + 1} = x_n - \frac{x_n - x_{n - 1}}{f(x_n) - f(x_{n - 1})} \cdot f(x_n)Vorgang:
- Startpunkte
x_0undx_1wählen (Punkte, die eine Nullstelle umschliessen) - Iteration durchführen, bis Ausgangsbedingung erfüllt wird
Konvergenz-Ordnung
Ein Verfahren hat eine Konvergenz-Ordnung q \ge 1, wenn es eine Konstante c > 0 für die für alle n Iterations-Schritte gilt:
|x_{n + 1} - \overline{x}| \le c \cdot |x_n - x}|^qc: Beliebige Konstanteq: Konvergenz-Ordnung- Für Newton-Verfahren:
q = 2 - Für vereinfachtes Newton-Verfahren:
q = 1 - Für Sekanten-Verfahren:
1 = (1 + \sqrt{5}) : 2 \approx 1.618
- Für Newton-Verfahren:
Fehlerabschätzung
Wenn folgendes zutrifft:
f(x_n - \varepsilon) \cdot f(x_n + \varepsilon) < 0Schneidet f zwischen x_n - \varepsilon und x_n + \varepsilon die Nullstelle.
Deswegen gilt folgendes:
|x_n - \xi| < \varepsilonSprich: Der Fehler ist kleiner als \varepsilon.
Vorgang:
\varepsilonsuchen, für die oben genannte Bedingung zutrifft- Der maximale Fehler ist
\varepsilon
x_n: Der approximierte $x$-Wert nach der $n$-ten Iteration\varepsilon: Der maximale Fehler\xi: Der Schnittpunkt der Nullstelle
Formelbuchstaben zu Nullstellenproblem
\alpha: Lipschitz-Konstante[a, b]: DerF(x): Die FixpunktgleichungF'(x): Die Ableitung der Fixpunktgleichungxundy: Beliebig gewählte Punkte im Interval[a,b]\tilde{x}: Das approximierte Resultat fürx(Fixpunkt)x_nDie $n$-te Approximation vonx
Lineare Gleichungssysteme
Lineares Gleichungssystem:
Lineare Gleichungssysteme haben jeweils die Form A \cdot x = b wobei A und b gegeben und x gesucht ist:
$$A = \left(
\begin{matrix}
a_{11} & a_{12} & \cdots & a_{1n} \
a_{21} & a_{22} & \cdots & a_{2n} \
\vdots & \vdots & & \vdots \
a_{n1} & a_{n2} & \cdots & a_{nn}
\end{matrix}
\right),
x = \left(
\begin{matrix}
x_1 \
x_2 \
\vdots \
x_n
\end{matrix}
\right),
b = \left(
\begin{matrix}
b_1 \
b_2 \
\vdots \
b_n
\end{matrix}
\right)
Eigenschaften
- Gleich viele gesuchte Variablen
x_nwie Gleichungenn. Folglich:- Die Matrix
Aist eine quadratische Matrix mit Dimensionenn \times n
- Die Matrix
Aist invertierbarAhat eine Determinante\det(A)
Dreiecks-Matrizen
L: Untere Dreiecksmatrix
Eine Matrix, die in der oberen rechten Ecke nur den Wert 0 und auf der Diagonale nur den Wert 1 hat. Eine Untere Dreiecksmatrix hat also folgende Form:
$$L = \left(
\begin{matrix}
1 & 0 & 0 & \cdots & 0 \
l_{21} & 1 & 0 & \cdots & 0 \
l_{31} & l_{32} & 1 & \ddots & 0 \
\vdots & \vdots & \ddots & \ddots & 0 \
l_{n1} & l_{n2} & \cdots & l_{nn - 1} & 1
\end{matrix}
\right)
R: Obere Dreiecksmatrix
Eine Matrix, die unten links von der Diagonale nur den Wert 0 beinhaltet. Eine Obere Dreiecksmatrix hat dementsprechend folgende Form:
$$R = \left(
\begin{matrix}
r_{11} & r_{12} & r_{13} & \cdots & r_{1n} \
0 & r_{22} & r_{23} & \cdots & r_{2n} \
0 & 0 & r_{33} & \cdots & r_{3n} \
\vdots & \vdots & \ddots & \ddots & \vdots \
0 & 0 & \cdots & 0 & r_{nn}
\end{matrix}
\right)
Code-Beispiele:
Umwandlung in $R$-Matrix:
for i in range(n):
if A[i, i] == 0:
index = -1
for j in range(i + 1, n):
if A[j, i] > 0:
index = j
if index == -1:
raise Exception("Invalid Matrix")
else:
# Swap lines
A[[i, index]] = A[[index, i]]
for j in range(i + 1, n):
factor = A[j, i] / A[i, i]
A[j] = A[j] - (factor * A[i])
Der Gauss-Algorithmus
Der Gauss-Algorithmus basiert darauf, dass ein lineares Gleichungssystem leicht lösbar ist, falls A eine obere Dreiecksmatrix ist. A muss also hierfür die Form einer oberen Dreiecksmatrix R haben.
Gauss-Algorithmus:
x_i = \frac{b_i - \sum_{j = i + 1}^n{a_{ij} \cdot x_j}}{a_{ii}}, i = n, n - 1, \dots, 1Um den Gauss-Algorithmus anzuwenden, muss die Matrix A erst in eine $R$-Matrix umgewandelt werden. Dies funktioniert wie folgt:
- Mit
ivon1bisn - Falls
a_{ii}den Wert0hat:- Mit
jvoni + 1bisn - Prüfen, ob
a_{ji}einen höheren Wert als0hat- Falls Zeile gefunden wurde:
a_{i}mita_{j}tauschenb_{i}mitb_{j}tauschen
- Sonst beenden: ungültige Matrix
- Falls Zeile gefunden wurde:
- Mit
- Mit
jvoni + 1bisna_k = a_k - \frac{a_{ki}}{a_{ii}} \cdot a_ib_k = b_k - \frac{a_{ki}}{a_{ii}} \cdot b_i
Code-Beispiel:
from numpy import array, zeros
def gaussMethod(A, b):
A = array(A)
n = A.shape[0]
A = A.reshape((n, n))
b = array(b).reshape((n))
result = zeros(n)
# Convert to R-Matrix
for i in range(n):
maxIndex = i
for j in range(i + 1, n):
if A[j, i] > A[maxIndex, i]:
maxIndex = j
# Swap lines
A[[i, maxIndex]] = A[[maxIndex, i]]
b[[i, maxIndex]] = b[[maxIndex, i]]
for j in range(i + 1, n):
factor = A[j, i] / A[i, i]
A[j] = A[j] - (factor * A[i])
b[j] = b[j] - (factor * b[i])
# Calculate result
for index in range(n, 0, -1):
i = index - 1
value = b[i]
for j in range(i, n):
value = value - A[i, j] * result[j]
result[i] = value / A[i, i]
return result.reshape((n, 1))
Fehlerfortpflanzung und Pivotisierung
- Da beim Umwandeln einer Matrix
Ain die $R$-Form Zeilen in jedem Schritt mit dem Faktor\lambda = \frac{a_{ji}}{a_{ii}}multipliziert werden, vergrössert sich der Schritt immer um|\lambda| \lambdakann klein gehalten werden, indem Zeilen der Grösse nach sortiert werden- In den Code-Beispielen ist dies bereits berücksichtigt
Determinanten-Bestimmung
Die Determinante einer Matrix A lässt sich einfach berechnen, sobald sie in die $R$-Form gebracht wurde mit folgender Formel:
Determinanten-Bestimmung mit Matrix \tilde{A} (die Matrix A in der $R$-Form):
$$\det(A) =
(-1)^l \cdot \det(\tilde{A}) =
(-1)^l \cdot \prod_{i = 1}^n{\tilde{a_{ii}}}
Code-Beispiel:
from numpy import array
def det(A):
l = 0
n = A.shape[0]
A = A.reshape((n, n))
# Convert to R-Matrix
for i in range(n):
maxIndex = i
for j in range(i + 1, n):
if A[j, i] > A[maxIndex, i]:
maxIndex = j
# Swap lines
A[[i, maxIndex]] = A[[maxIndex, i]]
l = l + 1
for j in range(i + 1, n):
factor = A[j, i] / A[i, i]
A[j] = A[j] - (factor * A[i])
result = 1
for i in range(n):
result = result * A[i, i]
return (-1 ** l) * result
Die $LR$-Zerlegung
In der $LR$-Zerlegung wird die Matrix A in die Matrizen L und R aufgeteilt, sodass A = L \cdot R gilt.
Alternative Namen dieses Vorgangs sind $LR$-Faktorisierung und $LU$-decomposition.
Für in L und R zerlegte Matrizen gilt:
A \cdot x = bund
A \cdot x = L \cdot R \cdot x = L \cdot y = bAufwand: Berechnung der $LR$-Zerlegung mit Gauss-Algorithmus benötigt ca. \frac{2}{3}n^3 Punktoperationen.
Falls Zeilenvertauschungen stattfinden, entsteht bei der $LR$-Zerlegung eine zusätzliche Permutations-Matrix P.
Für L und R zerlegte Matrizen mit Permutation P gilt:
P \cdot A = L \cdot RL \cdot y = P \cdot bR \cdot x = yDas Verfahren für die $LR$-Zerlegung ist identisch zu den Schritten bei der Umwandlung in eine $R$-Matrix. Jedoch wird jeweils der Wert l_{ji} in der (zu Beginn) leeren Matrix L mit dem im aktuellen Eliminationsschritt gesetzt. Zudem muss bei Vertauschungen die Permutations-Matrix P entsprechend angepasst werden:
Code-Beispiel:
from numpy import array, identity, zeros
def decomposite(A):
l = 0
n = A.shape[0]
R = A.reshape((n, n))
L = zeros((n, n))
P = identity((n, n))
# Convert to LR-Matrix
for i in range(n):
maxIndex = i
for j in range(i + 1, n):
if A[j, i] > A[maxIndex, i]:
maxIndex = j
# Swap lines
Pn = identity((n, n))
A[[i, maxIndex]] = A[[maxIndex, i]]
Pn[[i, maxIndex]] = Pn[[maxIndex, i]]
P = P * Pn
for j in range(i + 1, n):
factor = R[j, i] / R[i, i]
L[j, i] = factor
R[j] = R[j] - (factor * R[i])
result = 1
for i in range(n):
result = result * R[i, i]
return [L, R, P]
Wenn die $LR$-Zerlegung, wie in diesem Code, Zeilenaustausch und das Berechnen von P involviert, spricht man von einer $LR$-Zerlegung mit Spaltenmaximum-Strategie.
Vorgang:
- Gemäss vorhergehender Beschreibung und Code-Beispiel die Matrizen
LundRberechnen - Mit Hilfe des Gauss-Algorithmus
L \cdot y = P \cdot bnachyauflösen - Mit Hilfe des Gauss-Algorithmus
R \cdot x = ynachxauflösen
$QR$-Zerlegung
- Die Matrix
Awird in eine orthogonale MatrixQund eine obere DreiecksmatrixRzerlegt. - Orthogonal-Matrizen beschreiben Drehungen, Spiegelungen oder Kombinationen daraus.
- Eine $QR$-Zerlegung erfordert ca.
\frac{5}{3}n^3Punktoperationen - ca. doppelt so viel wie die $LR$-Zerlegung.
Orthogonal-Matrix:
Eine Matrix Q ist orthogonal, wenn folgendes gilt:
Q^T \cdot Q = I_n(x^T steht hierbei für eine Transformation)
Housholder-Matrizen
Im Rahmen der Berechnung der Matrizen Q und R werden sogenannte "Housholder-Matrizen" berechnet.
Housholder-Matrizen:
Sei u ein Vektor mit beliebig vielen Dimensionen, für den gilt:
|u| = \sqrt{u_1^2 + u_2^2 + \dots + u_n^2} = 1Die Householder-Matrix hat folgende Eigenschaft:
H := I_n - 2 \cdot u \cdot u^TFür Housholder-Matrizen gilt zudem folgendes:
H = H^T = H^{-1}und
H \cdot H = I_nBerechnung einer Housholder-Matrix
Beispiel der Berechnung einer Housholder-Matrix zur ersten Spalte der Matrix A.
Für die Berechnung wird ein Einheitsvektor
ebenötigt, welcher genauso viele Werte hat, wie die Matrix Dimensionen. Ein Einheitsvektor hat im ersten Feld den Wert1und in allen anderen Feldern der Wert0.Für eine Matrix
Amit der Dimensionn = 3lautet der Einheitsvektorealso wie folgt: $$e = \left(\begin{matrix} 1 \ 0 \ 0 \end{matrix}\right)
- Vektor
vbestimmenv = a_1 + sign(a_{11}) \cdot |a_1| \cdot e - Vektor normieren:
$$u = \frac{1}{|v|} \cdot v =
\frac{1}{\sqrt{1^2 + 2^2 + 3^2}} \cdot
\left(\begin{matrix}
1 \
2 \
3
\end{matrix}\right) =
\frac{1}{\sqrt{14}} \cdot
\left(\begin{matrix}
1 \
2 \
3
\end{matrix}\right)
- Die Housholder-Matrix
H = I_n - 2 \cdot u \cdot u^Tberechnen. $$H = \left(\begin{matrix} 1 & 0 & 0 \ 0 & 1 & 0 \ 0 & 0 & 1 \end{matrix}\right) - 2 \cdot \frac{1}{\sqrt{14}} \cdot \left(\begin{matrix} 1 \ 2 \ 3 \end{matrix}\right) \cdot \frac{1}{\sqrt{14}} \cdot \left(\begin{matrix} 1 & 2 & 3 \end{matrix}\right) \ H = \left(\begin{matrix} 1 & 0 & 0 \ 0 & 1 & 0 \ 0 & 0 & 1 \end{matrix}\right) - 2 \cdot \frac{1}{14} \cdot \left(\begin{matrix} 1 & 2 & 3 \ 2 & 4 & 6 \ 3 & 6 & 9 \end{matrix}\right) = -\frac{1}{7} \cdot \left(\begin{matrix} -6 & 2 & 3 \ 2 & -3 & 6 \ 3 & 6 & 2 \end{matrix}\right)
H: Housholder-MatrixI: Identitäts-Matrixn: Anzahl Dimensionen der Matrix
Vorgang
Im Rahmen des Vorgangs entspricht A_1 der Matrix A.
Die $QR$-Zerlegung kann folgendermassen durchgeführt werden:
R = AQ = I_n- Für
ivon1bisn - 1- Gemäss vorheriger Anleitung Householder-Matrix
H_ifür den VektorA[i:,i:i + 1]berechnen (i-te Spalte ab Zeilei) - Householder-Matrix um Identitäts-Matrix erweitern. Beispiel:
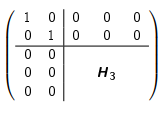
- Erweiterte Householder-Matrix als
Q_ispeichern R = Q_i \cdot RQ = Q \cdot Q_i^T- Die Gleichung
R \cdot x = Q^T \cdot bmit Gauss-Algorithmus lösen
- Gemäss vorheriger Anleitung Householder-Matrix
Code-Beispiel:
from numpy import array, identity, sign, sqrt, square, sum, zeros
def qrSolve(A, b):
A = array(A)
n = A.shape[0]
R = A.reshape((n, n))
Q = identity(n)
for i in range(n - 1):
I = identity(n - i)
Qi = identity(n)
e = zeros((n - i, 1))
e[0][0] = 1
a = R[i:,i:i + 1]
v = a + sign(a[0]) * sqrt(sum(square(a))) * e
u = (1 / sqrt(sum(square(v)))) * v
H = I - 2 * u @ u.T
Qi[i:,i:] = H
R = Qi @ R
Q = Q @ Qi.T
R[i + 1:,i:i + 1] = zeros((n - (i + 1), 1))
return linalg.solve(R, Q.T @ b)
Fehlerrechnung bei linearen Gleichungssystemen
Ähnlich wie herkömmliche Gleichungen, können Gleichungssysteme nicht mit eindeutiger Genauigkeit berechnet werden. Es entsteht ein Fehler.
Fehler bei linearen Gleichungssystemen:
A \cdot \tilde{x} = \tilde{b} = b + \Delta b\Delta x = \tilde{x} - xA: Matrix eines linearen Gleichungssystemsb: Gewünschtes Ergebnis des Gleichungssystems\tilde{b}: Ergebnis des Gleichungssystems unter Verwendung von\tilde{x}inA \cdot \tilde{x}\Delta b: Residuum: Die Differenz vonbund\tilde{b}x: Genaue Lösung\tilde{x}: Näherungslösung vonx\Delta x: Der Fehler der Näherungslösung\tilde{x}
Vektor- und Matrixnormen
Vektornormen:
$1$-Norm, Summen-Norm:
||x||_1 = \sum_{i = 1}^n|x_i|$2$-Norm, euklidische Norm:
||x||_2 = \sqrt{\sum_{i = 1}^n x_i^2}$\infin$-Norm, Maximum-Norm:
||x||_\infin = \max_{i = 1, \dots, n}|x_i|Matrixnormen:
$1$-Norm, Spaltensummen-Norm:
||A||_1 = \max_{j=1, \dots, n}\sum_{i = 1}^n|a_{ij}|$2$-Norm, Spektral-Norm:
||A||_2 = \sqrt{\rho(A^T \cdot A)}$\infin$-Norm, Zeilensummen-Norm:
||A||_\infin = \max_{i = 1, \dots, n}\sum_{j = 1}^n|a_{ij}|Folgendes gilt für die Abschätzung von Vektoren und Matrizen:
Fehlerabschätzung von Vektoren und Matrizen:
Für die Gleichung A \cdot x = b und die dazugehörige Approximation A \cdot \tilde{x} = \tilde{b} gilt:
Absoluter Fehler:
||x - \tilde{x}|| \le ||A^{-1}|| \cdot ||b - \tilde{b}||Falls ||b|| \not = 0 gilt zudem:
Relativer Fehler:
\frac{||x - \tilde{x}||}{||x||} \le ||A|| \cdot ||A^{-1}|| \cdot \frac{||b - \tilde{b}||}{||b||}Konditionszahl:
Die Konditionszahl cond(A) einer Matrix A berechnet sich wie folgt:
cond(A) = ||A|| \cdot ||A^{-1}||Eine hohe Konditionszahl cond(A) bedeutet, dass kleine Fehler im Vektor b zu grossen Fehlern im Ergebnis x führen können. In diesem Fall ist eine Matrix schlecht konditioniert.
Fehlerabschätzung von Matrizen mit Fehlern:
Sollte auch die Matrix A fehlerhaft sein (fehlerhafte Matrix \tilde{A}), gilt der nachstehende Satz unter folgender Bedingung:
cond(A) \cdot \frac{||A - \tilde{A}||}{||A||} < 1dann gilt:
Relativer Fehler:
$$\frac{||x - \tilde{x}||}{||x||} \le
\frac{cond(A)}{1 - cond(A) \cdot \frac{||A - \tilde{A}||}{||A||}} \cdot
\left(
\frac{||A - \tilde{A}||}{||A||} +
\frac{||b - \tilde{b}||}{||b||}
\right)
Aufwand-Abschätzung
Kennzahlen:
Lösung Linearer Gleichungssysteme mit Hilfe von...
Gauss-Elimination:
\frac{2}{3}n^3 + \frac{5}{2}n^2 - \frac{13}{6}n$LR$-Zerlegung:
\frac{2}{3}n^3 + \frac{7}{2}n^2 + \frac{13}{6}n$QR$-Zerlegung:
\frac{5}{3}n^3 + 4n^2 + \frac{7}{3}n - 7Ordnung $O(n)$
Die Ordnung O(n) der zuvor genannten Verfahren entspricht der höchsten Potenz von n, welche in der Formel zur Berechnung des Aufwands vorkommt.
Das bedeutet also folgendes:
Ordnung von Gauss-Elimination, $LR$-Zerlegung und $QR$-Zerlegung:
O(n^3)Iterative Verfahren zur Lösung von Gleichungssystemen
$LDR$-Zerlegung
Für die $LDR$-Zerlegung wird die Matrix A in drei Matrizen L, D und R aufgeteilt, wobei L eine untere Dreiecksmatrix, D eine Diagonalmatrix und R eine obere Dreiecksmatrix ist. Das bedeutet:
A = L + D + RMit
$$L = \left(
\begin{matrix}
0 & 0 & 0 & \cdots & 0 \
a_{21} & 0 & 0 & \cdots & 0 \
a_{31} & a_{32} & 0 & \cdots & 0 \
\vdots & \vdots & \ddots & \ddots & \vdots \
a_{n1} & a_{n2} & \cdots & a_{nn - 1} & 0
\end{matrix}
\right)
$$D = \left(
\begin{matrix}
a_{11} & 0 & 0 & \cdots & 0 \
0 & a_{22} & 0 & \cdots & 0 \
0 & 0 & a_{33} & \cdots & 0 \
\vdots & \vdots & \ddots & \ddots & \vdots \
0 & 0 & \cdots & 0 & a_{nn}
\end{matrix}
\right)
$$R = \left(
\begin{matrix}
0 & a_{12} & a_{13} & \cdots & a_{1n} \
0 & 0 & a_{23} & \cdots & a_{2n} \
0 & 0 & 0 & \ddots & \vdots \
\vdots & \vdots & \ddots & \ddots & a_{n-1,n} \
0 & 0 & \cdots & 0 & 0
\end{matrix}
\right)
Wichtig:
Hierbei handelt es sich nicht umLundRaus der $LR$-Zerlegung!
Jacobi-Verfahren
Das Jacobi-Verfahren ist ein iteratives Verfahren, welches nach jeder Iteration näher mit der tatsächlichen Lösung x konvergiert.
Das Jacobi-Verfahren ist auch bekannt als Gesamtschrittverfahren.
Jacobi-Verfahren:
Zunächst beginnt man mit x^{(0)} als ein Vektor, der nur aus $0$en besteht.
x^{(k + 1)} = -D^{-1} \cdot (L + R) \cdot x^{(k)} + D^{-1} \cdot bFür die Berechnung einzelner Elemente des Vektors x^{(k + 1)} gilt:
Für i von 1 bis n:
$$x^{(k + 1)}i = \frac{1}{a{ii}} \cdot
\left(
b_i - \sum_{j = 1,j \not = i}^n a_{ij} \cdot x^{(k)}_j
\right)
x^{(k)}: Die Annäherung anxnach der $k$-ten Iteration
Gauss-Seidel-Verfahren
Das Gauss-Seidel-Verfahren konvergiert schneller als das Jacobi-Verfahren.
Da für die Berechnung des Jacobi-Verfahrens für die Berechnung von x_2 auch Werte von x_1 verwendet werden, können die Werte direkt aus der aktuellen Iteration k wiederverwendet werden, um den Vorgang schneller konvergieren zu lassen.
Das Gauss-Seidel-Verfahren wird auch Einzelschrittverfahren genannt.
Gauss-Seidel-Verfahren:
x^{(k+1)} = -(D + L)^{-1} \cdot R \cdot x^{(k)} + (D + L)^{-1} \cdot bFür die Berechnung einzelner Vektor-Komponente wiederum:
Für i von 1 bis n:
$$x^{(k + 1)}i = \frac{1}{a{ii}} \cdot
\left(
b_i - \sum_{j = 1}^{i - 1} a_{ij} \cdot x^{k + 1}j -
\sum{j = i + 1}^n a_{ij} \cdot x^{(k)}_j
\right)
Konvergenz
Anziehung/Abstossung:
Gegeben sei eine Fixpunkt-Iteration:
x^{(n + 1)} = B \cdot x^{(n)} + c =: F(x^{(n)})Beispiele für solche Fixpunkt-Iterationen sind das Jacobi- oder das Gauss-Seidel-Verfahren.
Falls folgendes gegeben ist: \tilde{x} = B \cdot \tilde{x} + c = F(\tilde{x}), dann gilt:
\tilde{x}ist ein anziehender Fixpunkt, falls||B|| < 1\tilde{x}ist ein abstossender Fixpunkt, falls||B|| > 1
Abschätzungen:
Gegeben sei eine Fixpunkt-Iteration:
x^{(n + 1)} = B \cdot x^{(n)} + c =: F(x^{(n)})Für Fixpunkt-Iterationen bei denen x^{(k)} gegen \tilde{x} konvergiert (gemäss oben stehender Formel "Anziehung/Abstossung"), gelten folgende Abschätzungen:
a-priori Abschätzung:
$$||x^{(n)} - \overline{x}|| \le
\frac{||B||^n}{1 - ||B||} \cdot
||x^{(1)} - x^{(0)}||
a-posteriori Abschätzung:
$$||x^{(n)} - \overline{x}|| \le
\frac{||B||}{1 - ||B||} \cdot
||x^{(n)} - x^{(n - 1)}||
Die Matrix B hat hierbei je nach verwendetem Verfahren einen anderen Wert:
Matrix B für Abschätzung und Konvergenz
- Für das Jacobi-Verfahren:
B = -D^{-1} \cdot (L + R) - Für das Gauss-Seidel-Verfahren
B = -(D + L)^{-1} \cdot R
Diagonal-Dominanz:
Die Matrix A ist diagonal-dominant, falls eines der folgenden Kriterien zutrifft:
- Zeilensummen-Kriterium:
- Für alle
i = 1, \dots, ngilt:|a_{ii}| > \sum_{j = 1, i \not = j}^n{|a_{ij}|}
- Für alle
- Spaltensummen-Kriterium:
- Für alle
i = 1, \dots, ngilt:|a_{jj}| > \sum_{i = 1, i \not = j}{|a_{ij}|}
- Für alle
Für alle Matrizen, die diagonal-dominant sind gilt, dass sie für das Jacobi- und das Gauss-Seidel-Verfahren konvergieren.
Komplexe Zahlen
Der Bereich der Komplexen Zahlen dient dazu, Werte abzubilden, die es eigentlich nicht geben kann.
Beispiel einer komplexen Zahl:
x^2 = -1Es gibt keinen Wert, der -1 ergibt, wenn er quadriert wird. Es handelt sich also um eine komplexe Zahl.
Dafür wird die imaginäre Einheit i eingeführt mit folgender Eigenschaft:
i^2 = -1Für diese Definition wäre das Resultat von x^2= -1 also x = \plusmn{i}
In Python und in der Elektrotechnik wird der Buchstabe j verwendet.
Komplexe Zahlen z mit z = x + i \cdot y können nicht auf einem Zahlenstrahl dargestellt werden.
Sie können in einem Koordinaten-System eingezeichnet werden, wobei x der reale und y der imaginäre Anteil sind:
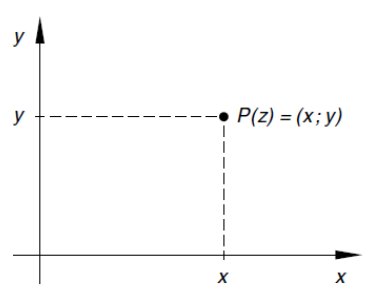
Dieses Koordinaten-System nennt sich auch Gaussche Zahlenebene.
Komplexe Zahlen:
Imaginäre Einheit i:
i^2 = -1Komplexe Zahlen z:
z = x + i \cdot yKonjugierte komplexe Zahl:
z^* = x - i \cdot yBetrag von z:
|z| = \sqrt{x^2 + y^2}Menge aller komplexen Zahlen \mathbb{C}:
\mathbb{C} = \{ z | z = x + i \cdot y \text{ mit } x, y \in \mathbb{R}\}Veranschaulichung einer konjugierten komplexen Zahl z^*:
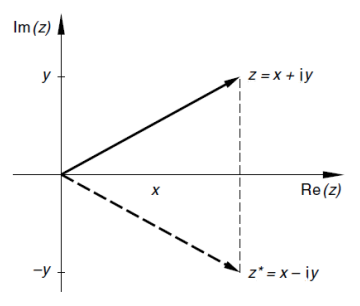
\mathbb{C}: Menge aller komplexen Zahlenx: Realteil einer komplexen Zahly: Imaginärteil einer komplexen Zahlz: Komplexe Zahl
Darstellungsformen:
Es gibt diverse Darstellungsformen für komplexe Zahlen:
- Normalform (auch "algebraische" oder "kartesische" Form):
z = x + i \cdot y - Trigonometrische Form:
z = r \cdot (\cos(\varphi) + i \cdot \sin(\varphi)) - Exponential-Form:
z = re^{i \cdot \varphi}
Beispiel einer komplexen Zahl z in der Normalform und der Trigonometrischen Form:
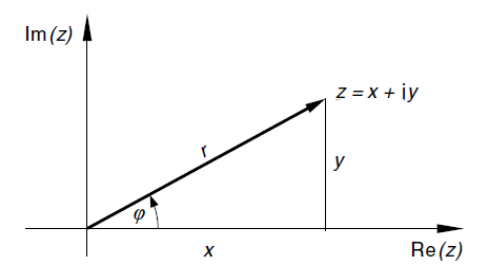
r: Die Länge des Vektors einer komplexen Zahlz(r = |z|)\varphi: Der Winkel zwischen der x-Achse und dem Vektor der komplexen Zahlz
Rechen-Regeln
Rechen-Regeln für komplexe Zahlen:
Addition:
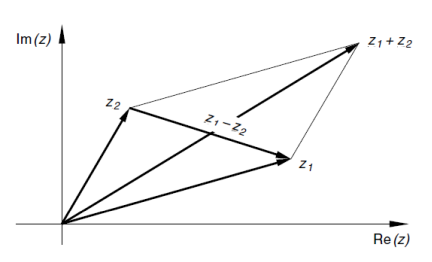
z_1 + z_2 = (x_1 + x_2) + i \cdot (y_1 + y_2)Subtraktion:
z_1 - z_2 = (x_1 - x_2) + i \cdot (y_1 - y_2)Multiplikation:
$$z_1 \cdot z_2 = (x_1 \cdot x_2 - y_1 \cdot y_2) +
i \cdot(x_1 \cdot y_2 + x_2 \cdot y_2)
Division:
$$\begin{aligned}
\frac{z_1}{z_2} &=
\frac{z_1 \cdot z_2^}{z_2 \cdot z_2^} =
\frac{(x_1 + i \cdot y_1) \cdot (x_2 - i \cdot y_2)}{(x_2 + i \cdot y_2) \cdot (x_2 - i \cdot y_2)} \
&= \frac{(x_1 \cdot x_2 + y_1 \cdot y_2) + i \cdot (y_1 \cdot x_2 - x_1 \cdot y_2)}{x_2^2 + y_2^2} \
&= \frac{(x_1 \cdot x_2 + y_1 \cdot y_2)}{x_2^2 + y_2^2} + i \cdot \frac{(y_1 \cdot x_2 - x_1 \cdot y_2)}{x_2^2 + y_2^2}
\end{aligned}
Visualisierung von Addition und Subtraktion zwei komplexer Zahlen z_1 und z_2:
Potenzieren in der Polarform:
Für komplexe Zahlen in der Normalform gilt folgendes:
- Sei
n \in \mathbb{N}: $$z^n = (r \cdot e^{i \cdot \varphi})^n = r^n \cdot e^{i \cdot n \cdot \varphi} = r^n \cdot (\cos(n \cdot \varphi) + i \cdot \sin(n \cdot \varphi))
Fundamentalsatz der Algebra:
Eine algebraische Gleichung $n$-ten Grades mit komplexen Koeffizienten und Variablen a_i, z \in \mathbb{C}
a_n \cdot z^n + a_{n - 1} \cdot z^{n - 1} + \dots + a_1 \cdot z + a_0 = 0besitzt in der Menge \mathbb{C} der komplexen Zahlen genau n Lösungen.
Ziehen der Wurzel einer komplexen Zahl:
Die Gleichung für das Ziehen einer Wurzel n der komplexen Zahl a lautet: z^n = a.
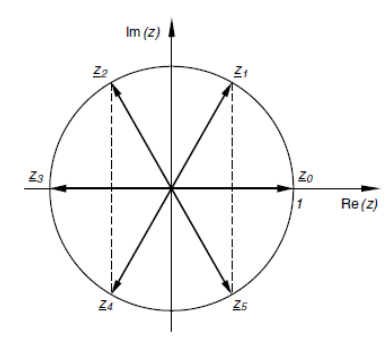
Für die Lösung dieser Gleichung existieren genau n verschiedene Lösungen in der Menge \mathbb{C}:
z_k = r \cdot (\cos(\varphi_k + i \cdot \sin(\varphi_k)) = r \dot e^{i \cdot \varphi_k}für k = 0, 1, 2, \dots, n - 1:
mit
r = \sqrt[n]{r_0}\varphi_k = \frac{\varphi + k \cdot 2 \cdot \pi}{n}Die Bildpunkte der Ergebnisse liegen in der komplexen Zahlenebene auf einem Kreis um den Nullpunkt mit dem Radius r = \sqrt[n]{r_0} und bilden die Ecken eines regelmässigen $n$-Ecks.
Visualisierung des Ziehens der $6$-ten Wurzel einer komplexen Zahl z:
Eigenwerte und Eigenvektoren
Für Matrizen A gibt es Vektoren x und Faktoren \lambda, für die gilt:
A \cdot x = \lambda \cdot x- $x$-Werte, für die das zutrifft, nennen sich Eigenvektoren von
A - $\lambda$-Werte, für die das zutrifft, nennen sich Eigenwerte von
A
Eigenwerte und Eigenvektoren:
Falls für eine gegebene Matrix A, einen beliebigen Vektor x \not = 0 und einen beliebigen Wert \lambda folgendes zutrifft:
A \cdot x = \lambda \cdot xxist ein Eigenvektor vonA\lambdaist ein Eigenwert vonA
In manchen Fällen müssen für die Berechnung von Eigenwerten und Eigenvektoren komplexe Vektoren z normiert werden.
Dies funktioniert folgendermassen:
Normierung komplexer Vektoren:
$$x = z \cdot \frac{1}{|z|} =
\left(
\begin{matrix}
z_1 \
\vdots \
z_n
\end{matrix}
\right) \cdot
\frac{1}{\sqrt{z_1 \cdot z_1^* + \dots + z_n \cdot z_n^*}}
z: Komplexer Vektorz_n: $n$-te Komponente des Vektorszx: Normierter Vektorz
Eigenschaften von Eigenwerten:
\lambda ist ein Eigenwert von A, fals folgendes gilt:
det(A - \lambda \cdot I_n) = 0Eigenwerten und die Spur & Determinante von Matrizen:
- Die Determinante einer Matrix
Aist das Produkt aller Eigenwerte. - Die Spur (trace) - also die Summe aller Diagonalelemente - ist die Summe aller Eigenwerte
det(A) = \lambda_1 \cdot \lambda_2 \dots \lambda_ntrace(A) = a_{11} + a_{22} + \dots + a_{nn} = \lambda_1 + \lambda_2 + \dots + \lambda_n- Wenn
\lambdaein Eigenwert vonAist, so ist der Kehrwert\frac{1}{\lambda}ein Eigenwert der inversen MatrixA^{-1}
- Die Vielfachheit, mit der
\lambdain der Determinante auftritt nennt sich algebraische Vielfachheit von\lambda - Das Spektrum
\sigma(A)ist die Menge aller Eigenwerte vonA
Eigenwerte in speziellen Matrizen:
Für Diagonal-Matrizen und Dreiecks-Matrizen gilt:
- Die Eigenwerte entsprechen den Diagonal-Elementen.
Eigenraum:
Als Eigenraum bezeichnet man eine beliebige Anzahl Vektoren, die alle für dein Eigenwert \lambda gelten.
Indem man diese Vektoren kombiniert, lassen sich beliebig viele neue Eigenvektoren zum Eigenwert \lambda bestimmen.
Für den Eigenwert \lambda von A bilden Eigenvektoren zum Eigenwert \lambda und der Nullvektor 0 einen Eigenraum der Form \mathbb{C}^n
- Die Dimension des Eigenraumes von
\lambdabestimmt sich durch folgende Formel:
Das Ergebnis nennt sich geometrische Vielfachheit und entspricht der Anzahl unabhängiger Eigenvektoren zum Eigenwertn - Rg(A - \lambda \cdot I_n)\lambda. - Die geometrische Vielfachheit ist kleiner oder gleich der algebraischen Vielfachheit
A: Eine beliebige Matrixx: Eigenvektor einer MatrixA\lambda: Eigenwert einer MatrixA
Numerische Bestimmung von Eigenwerten und Eigenvektoren
Theorie
Ähnliche Matrizen:
Eine Matrix B ist zu einer Matrix A ähnlich, wenn für eine beliebige Matrix T gilt:
B = T^{-1} \cdot A \cdot TDiagonalisierbarkeit:
Eine Matrix A ist diagonalisierbar, wenn für eine Matrix T das Ergebnis D von
D = T^{-1} \cdot A \cdot Teine Diagonalmatrix ist.
A: Beliebige MatrixB: Ergebnis einer Transformation der MatrixAD: Ergebnis einer Transformation der MatrixA, welche eine Diagonalmatrix istT: Beliebige Transformations-Matrix
Eigenwerte und Eigenvektoren ähnlicher/diagonalisierbarer Matrizen:
- Es seien
AundBzueinander ähnliche MatrizenAundBhaben dieselben Eigenwerte inkl. deren algebraische Vielfachheit- Ist
xein Eigenvektor zum Eigenwert\lambdavonB, so istT \cdot xein Eigenvektor zum Eigenwert\lambdavonA - Wenn
Adiagonalisierbar ist gilt zudem folgendes:- Für
D = T^{-1} \cdot A \cdot T - Die
nDiagonal-Elemente vonDsind die Eigenwerte vonA - Die
nlinear unabhängigen Eigenvektoren vonAsind die Spalten des verwendetenT
- Für
$QR$-Verfahren
Das $QR$-Verfahren ist ein iteratives Verfahren zur Bestimmung von Eigenwerten einer Matrix A.
Der Vorgang ist dabei folgender:
A_0 = AP_0 = I_n- Für
i = 0, 1, 2, \dots, \infin:- $QR$-Zerlegung durchführen:
A_i = Q_i \cdot R_i A_{i + 1} = R_i \cdot Q_iP_{i + 1} = P_i \cdot Q_i
- $QR$-Zerlegung durchführen:
P_izurückgeben
Code-Beispiel:
from numpy import array, identity, sign, sqrt, square, sum, zeros
def qr(A):
A = array(A)
n = A.shape[0]
R = A.reshape((n, n))
Q = identity(n)
for i in range(n - 1):
I = identity(n - i)
Qi = identity(n)
e = zeros((n - i, 1))
e[0][0] = 1
a = R[i:,i:i + 1]
v = a + sign(a[0]) * sqrt(sum(square(a))) * e
u = (1 / sqrt(sum(square(v)))) * v
H = I - 2 * u @ u.T
Qi[i:,i:] = H
R = Qi @ R
Q = Q @ Qi.T
R[i + 1:,i:i + 1] = zeros((n - (i + 1), 1))
return [Q, R]
def EV(A, iterations):
A = array(A)
n = A.shape[0]
P = identity(n)
for i in range(iterations):
[Q, R] = qr(A)
A = R @ Q
P = P @ Q
return [A, P]
Vektor-Iteration
Die Vektor-Iteration, auch von-Mises-Iteration genannt, erlaubt das Bestimmen des grössten Eigenwertes \lambda einer diagonalisierbaren Matrix A.
Spektral-Radius:
Der Spektral-Radius \rho(A) definiert den höchsten Eigenwert der Matrix A:
\rho(A) = \max\{|\lambda|\; | \; \lambda \text{ ist ein Eigenwert von }A \in \mathbb{R}^{n \times n}\}Sei A eine diagonalisierbare Matrix mit den Eigenwerten \lambda_1, \dots, \lambda_n wobei \lambda_1 betragsmässig am höchsten ist:
|\lambda_1| > |\lambda_2| \ge \dots \ge | \lambda_n|Der grösste Eigenwert \lambda_1 und der dazugehörige Eigenvektor v lässt sich mit der Vektor-Iteration bestimmen.
Zunächst muss ein beliebiger Startvektor v_0 \in \mathbb{C}^n mit Länge 1 gewählt werden.
Als nächstes wird für k = 0, \dots, \infin folgendes ausgeführt:
v^{(k + 1)} = \frac{A \cdot v^{(k)}}{||A \cdot v^{(k)}||_2}\lambda^{(k + 1)} = \frac{(v^{(k)})^T \cdot A \cdot v^{(k)}}{(v^{(k)})^T \cdot v^{(k)}}Code-Beispiel:
from numpy import array, linalg
def vectorIteration(A, v, iterations = 10):
l = 0
v = array(v)
v = v.reshape(len(v), 1)
for i in range(iterations):
l = ((v.T @ A @ v) / (v.T @ v)).item()
v = (A @ v) / (linalg.norm(A @ v, ord=2))
print()
print(f"k: {i + 1}")
print(f"x: {v}")
print(f"λ: {l}")
return [v, l]
Formelbuchstaben
\alpha: Lipschitz-Konstante (siehe Fixpunktsatz)[a,b]: Das Untersuchungs-Interval für den Banachschen FixpunktsatzA: Matrix eines linearen Gleichungssystems\tilde{A}: Umgewandelte Version der MatrixAA^T: Transformierte MatrixAb: Das gewünschte Resultat eines linearen GleichungssystemsB: Basis der Maschinenzahle: Exponent der MaschinenzahlH: Housholder-Matrix (siehe $QR$-Zerlegung)I: Identitäts-Matrix (Matrix, überall den Wert0und auf der Diagonalen den Wert1hat)i: Imaginäre Einheit für die Darstellung komplexer Zahlenj: Alternative Schreibweise füriin Python und in der ElektrotechnikK: KonditionszahlL: Untere Dreiecksmatrix/Normierte Matrixm: Mantisse (Darstellbarer Bereich der Maschinenzahl)n: Anzahl möglicher Stellen der Mantissemq: Konvergenz-OrdnungQ: Orthogonal-Matrix in der $QR$-ZerlegungR: Obere DreiecksmatrixRg(A): Der Rang der MatrixA(Anzahl Zeilen\not = 0, die nach Gauss-Elimination übrig bleiben)T: Transformations-Matrixx: Darzustellender Wertx_n: Die $n$-te Approximation vonx\tilde{x}: Approximation/Annäherung anx\overline{x}: Exaktes Ergebnis vonxx^{(k)}: Die Annäherung vonxin der $k$-ten Iteration\lambda: Eigenwert einer Matrix\rho(A): Spektral-Radius der MatrixA(siehe Vektor-Iteration)